RosiE
Robuste und sicherheitsrelevante Echtzeitlokalisation
| Laufzeit: | 01.06.2016 - 31.10.2018 |
| Leitung: | Prof. Dr.-Ing. Horst Hellbrück |
| Mitarbeiter: | Manfred Constapel, M.Sc., Dipl.-Ing. (FH) Tim Esemann, Marco Cimdins, M.Sc., Dr.-Ing. Mathias Pelka |
Hintergrund
Für Anwendungen, in denen Industrieroboter autonom agieren und/oder autonome Fahrzeuge fahren, ist das Gefährdungspotential für Menschen sehr hoch. Zur Überwachung eines Sicherheitsbereichs zum Schutz von Mensch und Technik ist der Einsatz von Echtzeitlokalisation vorteilhaft. Ist eine Gefährdung wie der Aufenthalt von Menschen in einer Sperrzone erkannt, sind umgehend Gegenmaßnahmen wie z.B. Alarm, Voll- oder Teilabschaltung der Maschinen einzuleiten. Dazu sind die Lokalisationsinformationen an ein übergeordnetes Systems weiterzuleiten
Ziel
Ziel des Forschungs- und Entwicklungsvorhabens ist die Entwicklung und prototypische Umsetzung einer robusten und sicherheitsrelevanten Echtzeitlokalisation auf Basis von Funksignalen. Dazu werden neuartige Lokalisationstechniken benötigt und entwickelt.
Ansatz
Das eingesetzte Verfahren soll in der Lage sein, Objekte im Sicherheitsbereich zu verfolgen und den Eintritt in einen Sperrbereich zu erkennen und zu melden. Zur Zutrittskontrolle in den Sicherheitsbereich wird ein passives Lokalisationssystem verwendet, während für den Sicherheits- und Sperrbereich eine Anker /Tag basierte Lokalisierung verwendet wird.
Ergebnisse
Zwischenergebnisse der aktiven Ortung

Abb.1: Gebäudegeometrie am Beispiel eines Flures der TH Lübeck.
Um Ortungssysteme robuster zu gestalten wurden verschiedene Ansätze sowie Ortungstechnologien untersucht. So wurden zum Beispiel Bluetooth-basierte Ortungsmethoden auf Basis von Lateration, Fingerprinting sowie Proximity untersucht. Ebenfalls wurden Funktechnologien wie z.B. LoRa, Bluetooth sowie IEEE 802.15.4 (ZigBee) auf ihre Robustheit untersucht.
Um die Robustheit des Ortungssystems zu erhöhen, ist es möglich die Anzahl der benötigten Referenzpunkte zu reduzieren. Durch die Verwendung nur eines Referenzpunktes, ist weniger Infrastruktur notwendig. Dies senkt die Konsten für den Aufbau von Ortungssystemen. Für eine normale Gebäudegeometrie (Abb.1) wurde untersucht, ob Ortung mit nur einem Referenzpunkt möglich ist.
Ein Ansatz ist es, mehrere Antennen in einen Referenzpunkt zu integrieren, um bewährte Technologien wie (hyperbolische) Lateration auf Basis von hochpräzisen Zeitmessungen bzw. Distanzmessungen zu nutzen. Dies stellt hohe Anforderungen an die verwendete Hardware, da z.B. die Messabweichungen der Distanzmessungen in der Größenordnung der verwendeten Antennengeometrie liegen.
Auch durch geeignete Filter, wird die Robustheit des Ortungssystems gegenüber Signalstörungen wie z.B. Abschattungen oder Nicht-Sichtverbindungen erhöht. So werden Messabweichungen durch eine Kombination aus linearen und nichtlinearen Filtern korrigiert. Durch nachgeschaltete Filter, welche die Bewegung eines Objektes vorhersagen, wird im Falle eines Ausfalls des Ortungssystems die Position einer Person dennoch bestimmt.
Robuste Ortung auf Basis von Distanzmessungen
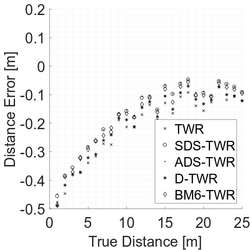
Abb.2: Systematischer Fehler für den euklidischen Abstand zwischen wahrer und gemessener Distanz.
In einer weiteren Untersuchung wurden fünf unterschiedliche Arten der Zwei-Wege Distanzmessung untersucht und bewertet. Diese weisen unterschiedliche Eigenschaften, wie z.B. Anzahl der Nachrichten, Einfluss des Uhrenfehlers und Robustheit auf. In der Untersuchung wurde zusätzlich geklärt, wie genau die Distanzmessung der Verfahren ist. Zusätzlich wurde untersucht, ob Unterschiede zwischen Freifeld-Bedingungen oder Innenraum-Bedingungen vorliegen.
Abbildung 2 zeigt beispielsweise den systematischen Fehler für den euklidischen Abstand zwischen wahrer Distanz und gemessener Distanz in Abhängigkeit von der wahren Distanz. Dieser systematische Fehler wird durch zwei Effekte verursacht: Zum einen handelt es sich um den Uhrenfehler, hervorgerufen durch Abweichungen in den Oszillatoren. Zum anderen dadurch, dass der Funkempfänger eine Abhängigkeit von der Signalempfangsstärke aufweist.
Zwischenergebnisse der gerätefreien Ortung
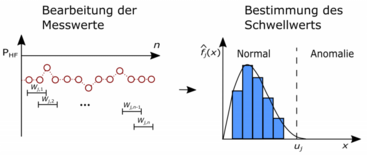
Abb.3: Bestimmen des Schwellwerts anhand zuvor gemessener Signalstärken.
Das Ziel von gerätefreien Ortungssystemen ist die Erkennung der Präsenz und die anschließende Ortung von Personen ohne speziell mitgeführte Geräte. Bewegt sich eine Person in einem Zielbereich, so entstehen durch Ausbreitungseffekte Änderungen der Signalstärke eines Funksignals. Dazu wird in einer Trainingsphase, wenn der Zielbereich frei ist, die Signalstärken gemessen und ein Schwellwert bestimmt (Abb.3). Wird in der Onlinephase dieser Schwellwert überschritten, so wurde eine Person erkannt, welche anschließend mit nichtlinearen Filtern geortet wird.
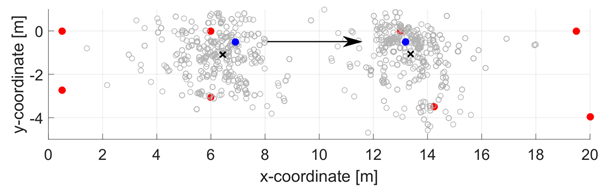
Abb.4: Mit 8 Sensoren überwachter Flur.
In Abbildung 4 ist ein Flur zu sehen, welcher mit 8 Sensoren (dargestellt durch die roten Punkte) gerätefrei überwacht wird. Der blaue Punkt stellt die tatsächliche Position, das schwarze Kreuz die durch den Filter geschätzte Position der Person dar. Die grauen Kreise, die sog. Partikel, sind Zwischenberechnungen/Stichproben für die Positionsschätzung. Idealerweise folgen die Partikel den Bewegungen der Person und ermöglichen somit eine genaue Ortung.
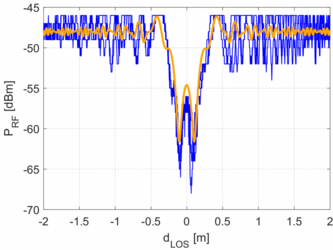
Abb.5: Messungen zur Funkausbreitung in An- und Abwesenheit einer Person.
Ein weiterer essentieller Schritt für die Entwicklung von System ist das Verständnis der Funkausbreitung in An- und Abwesenheit einer Person. Hierzu wird der Einfluss der Person mittels Kantenbeugung modelliert und gegen die Freifeldsignalstärke verrechnet. Bewegt sich eine Person durch die Mitte einer Funkübertragung ergeben sich folgende Messungen (Abb.5).
Projektpartner | Gefördert durch | |
| Bundesministerium für Wirtschaft und Energie Förderkennzeichen: ZF4186102ED6 | ||
 |   | |