BOSS COGNET
Bionic Observation and Survey System – Cognition and Network
| Laufzeit: | 01.04.2013 - 31.03.2017 |
| Leitung: | Prof. Dr.-Ing. Horst Hellbrück |
| Mitarbeiter: | Dipl.-Ing. (FH) Gunther Ardelt, Dipl.-Ing. (FH) Tim Esemann, Dr.-Ing. Torsten Teubler |
Hintergrund

Abb.1: BOSS-System
Im Verbundprojekt BOSS (Bionic Observation and Survey System) werden innovative Unterwasserfahrzeuge in Form bionischer Manta-Rochen für Inspektions- und Monitoring-Aufgaben im Meer entwickelt. Hierbei werden die Mantas ferngesteuert aber auch autonom in einem Schwarm agieren. BOSS wird von der Fachhochschule Lübeck in Kooperation mit zwei Industriepartnern, EvoLogics GmbH und Sea & Sun Technology GmbH, durchgeführt. Evologics fungiert als Projektkoordinator und entwickelt die Mantas als bionische Unterwasserfahrzeuge. Sea & Sun Technology ist für die Unterwasser-Sensorik verantwortlich. Die Fachhochschule Lübeck konzentriert sich im Teilprojekt BOSS COGNET (Cognition and Network) auf die Entwicklung maritimer IKT-Lösungen (Informations- und Kommunikationstechnik).
Ziel
Traditionelle Verfahren zur Unterwasserkommunikation sind meist auf hohe Reichweiten optimiert und bieten nur geringe Datenraten. Im Bereich der Schwarmkommunikation ist aber meist das Gegenteil gewünscht: Hohe Datenraten über geringe bis mittlere Distanzen. Für das Übertragen von Daten, die während einer Mission gesammelt worden sind, an eine Basisstation gibt es ähnliche Anforderungen. Aus diesem Grund ist die Implementierung und Evaluierung innovativer Techniken zur Unterwasserkommunikation eines unsere Ziele im Projekt BOSS.
Ansatz
In COGNET wird ein dynamisches mobiles Unterwasser-Intranet geschaffen, basierend auf heterogener flexibler Ad-Hoc-Vernetzung mit Telemetrie-Anbindung. Das UW-Intranet wird dabei in das Internet integriert. Als Kerninnovation werden die autonomen Mantas mit speziellen Sensormodulen sowie multimedial vernetzbaren Kommunikations- und Navigationsschnittstellen ausgestattet. In einem umfangreichen Experimentalprogramm werden intelligente kognitive und auto-adaptive Eigenschaften der Mantas entwickelt und Techniken der interoperablen Systemvernetzung für die Kommunikation und Navigation erprobt. Sukzessive werden danach Fähigkeiten zu kooperativem Verhalten und der Selbstorganisation im Schwarm ausgebildet. Zum Erreichen dieser Ziele wird mittels Algorithmen-Entwurf und Simulation ein regelbasiertes Expertensystem implementiert und schrittweise erweitert. Für Praxistests und Optimierung werden vorhandene drahtlose Sensortestbeds und bisher gewonnene Erfahrungen im Aufbau von Simulatoren und Testbeds eingesetzt.
Ergebnisse
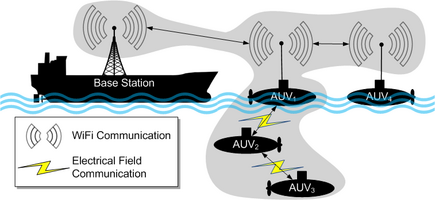
Abb.2: Schematisch dargestelltes Mesh-Netz
Vernetzung
Eines der Hauptziele des Projektes ist die Vernetzung der Fahrzeuge und der Fahrzeugkomponenten untereinander. Bezüglich Vernetzung konnten diese Ziele erreicht werden.
Die Fahrzeuge können im aufgetauchten Zustand mittels WLAN miteinander, als auch mit der Infrastruktur, kommunizieren. Das WLAN Netz ist dabei kein "klassisches" WLAN mit Stationen und Zugangspunkten, sondern ein sogenanntes "Mesh-Netz". Ein Mesh-Netz ermöglicht eine Kommunikation über Zwischenstationen, wenn z.B. Kommunikationspartner nicht in direkter Funkreichweite sind.
Das Mesh-Netz haben wir auch auf die Unterwasser-Kommunikation über das elektrische Feld ausgedehnt. So können sich Kommunikationspartner unter Wasser befinden und mit Zwischenstationen, die sich über Wasser befinden, kommunizieren. Abbildung 2 visualisiert ein Mesh-Netz schematisch. Die Basis Station kann über AUV1 mit AUV4 per WLAN kommunizieren. AUV2 und AUV3 sind ebenfalls über AUV1 erreichbar, wobei hier die Kommunikation über das elektrische Feld zum Einsatz kommt.
Um die Vernetzung an sich und die verteillten Algorithmen zu testen, wurde ein sogenanntes Testbed aufgebaut, welches ein Teil der vernetzten elektronischen Komponenten von vier Fahrzeugen enthält. In dem Testbed wird die Integration von Sensoren in die interne Fahrzeuginfrastruktur als auch Langzeittests von Sensoren und Programmen vorgenommen. Abbildung 3 zeigt das Testbed schematisch, wobei die Komponenten AUV1 detailliert dargestellt sind. AUV2 bis AUV4 sind rechts oben angedeutet. Der Testbed-Wartungsrechner (Testbed Maintenance Computer) ermöglicht den Entwicklern (Developer) Zugriff auf die Komponenten über den "Wartungsbus" (Maintenance Bus), wenn diese über das Netz temporär nicht erreichbar sind, weil sich z.B. die Konfiguration geändert hat.
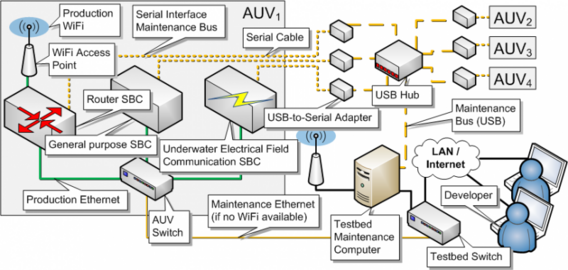
Abb.3: Schematisch dargestelltes Testbed
Sensorik
Weiterhin befassen wir uns mit Sensorik im Allgemeinen. So wurde im Rahmen einer Studienarbeit eine Markmalsextraktion aus Sonarbildern implementiert. Die Abbildungen unten (Abb.4-7) zeigen die Zwischenstufen der Mekmalsextraktion. Aus den Rohdaten des Sonars wird ein Bild erzeugt (Abb.4). Durch Anwendung von Glättungsfiltern und Kantendetektion wird schrittweise eine dominate Kontur extrahiert (Abb.5-6). Dann werden auf den Kontur äquidistant Koordinaten verteilt (Blaue Punktein Abb.7) und die Kontur an Start- (gründer Punkt in Abb.7) und Endpunkt (roter Punkt in Abb.7) geschlossen. Diese Koordinaten dienen als diskrete Eingabe für eine weitere maschinelle Verarbeitung. Anhand der Koordinaten kann beispeilseweise die Größe der erkannten Kontur abgeschätzt werden.
Abb.4: Zwischenstufe 1 - Bild aus Rohdaten des Sonars

Abb.5: Zwischenstufe 2 - Anwendung von Glättungsfiltern und Kantendetektion

Abb.6: Zwischenstufe 3 - Anwendung von Glättungsfiltern und Kantendetektion
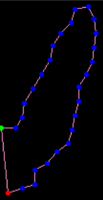
Abb.7: Zwischenstufe 4 - Koordinatenverteilung auf Kontur
Unterwasser-Kommunikation
Zur Implementierung und Evaluierung unserer verschiedenen Unterwasserkommunikationen haben wir ein modulares System entwickelt. Unsere modulare Architektur ermöglicht es verschiedene Kommunikationsmedien zu nutzen und bietet eine hohe Wiederverwendbarkeit von Software-Modulen. Eine Übersicht unserer Architektur ist im folgenden dargestellt.
Zurzeit arbeiten wir an drei Kommunikationsverfahren: Die optischen Kommunikation für sehr niedrige Reichweiten (< 1 m) mit sehr hohen Datenraten, der elektrischen Feldkommunikation für niedrige Reichweiten (< 15 m) mit hohen Datenraten und einer akustischen Kommunikation für mittlere Reichweiten (< 100 m) mit mittleren Datenraten.
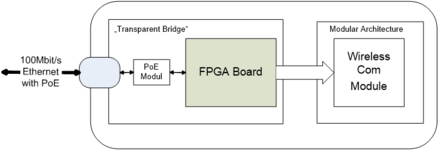
Abb.8: Übersicht modulare Architektur.
Elektrische Feldkommunikation
Da herkömmliche Funk-Signale, wie zum Beispiel WLAN, unter Wasser sehr stark gedämpft werden, haben wir hier einen neuartigen Ansatz gewählt. Mit diesem Ansatz ist es uns möglich, Daten über mehrere Meter mit hohen Datenraten zu übertragen. Tests im Schwimmbad haben gezeigt das es möglich ist mit unserem Ansatz ein Video mit einer Datenrate von 250 kbit/s über eine Distanz von mehr als 8 m zu streamen.
| Datenrate | 250 kbit/s |
| Reichweite | 8 m |
| Leistungsaufnahme | 30W (Sendebetrieb) |
| Formfaktor | 310x115x60 mm |

Abb.9: Schwimmbad-Test.
Optische Kommunikation
Für die Kommunikation über kurze Reichweiten, wie zum Beispiel das kontaktlose Übertragen von Daten an eine Basisstation, haben wir eine optische Lösung implementiert. Dieses Frontend überträgt Daten mittels Licht kegelförmig mit einem Abstrahlungswinkel von etwa 110°. Wir konnten bereits Datenraten um die 300 kbit/s erreichen und arbeiten kontinuierlich daran diese zu erhöhen.
| Datenrate | 300 kbit/s |
| Reichweite | 0,7 m |
| Leistungsaufnahme | 10W (Sendebetrieb) |
| Formfaktor | 150x100x50 |
Akustische Kommunikation
Die meisten Verfahren zur akustischen Kommunikation sind auf große Reichweiten im Bereich von Kilometern ausgelegt und erreichen deshalb nur geringe Datenraten. Im Projekt BOSS evaluieren wir akustische Kommunikation für mittlere Distanzen (< 100 m) und optimierter Datenrate. Hierzu haben wir ein Frontend für den Betrieb mit breitbandigen Transducern entwickelt.
| Datenrate | 150 kbit/s |
| Reichweite | 100 m |
| Leistungsaufnahme | 20W (Sendebetrieb) |
| Formfaktor | 150x100x50 |
Projektpartner | Gefördert durch | |
| Bundesministerium für Wirtschaft und Energie
| |
| ||